Description
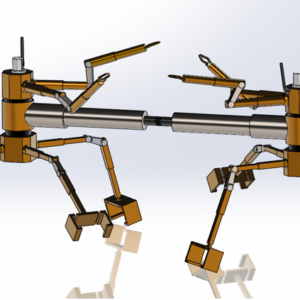
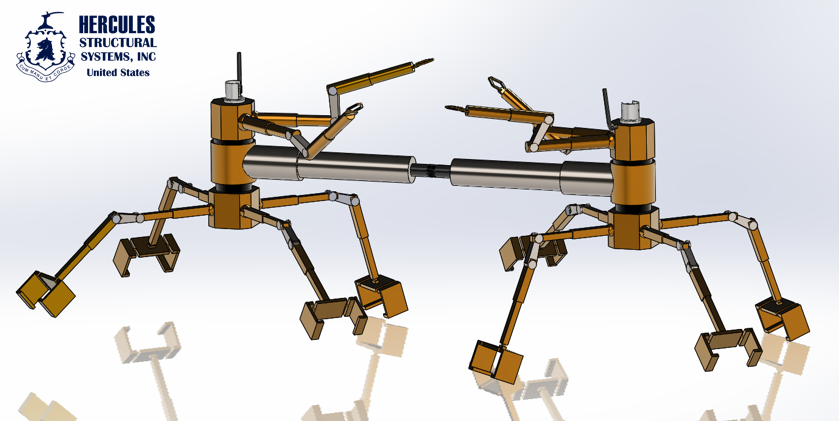
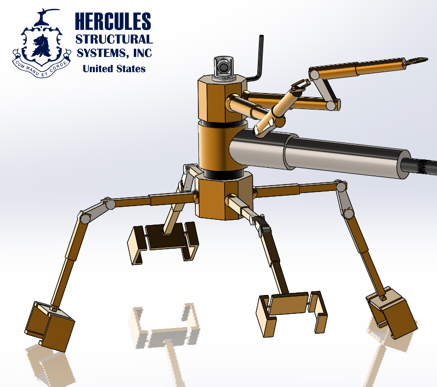
This robot is designed to sit on steel beams and columns and perform the construction tasks from that position. The structure of the robot allows it to move in all four main directions: up, down, left, and right. This feature enables the robot to access all points of the steel frame without the need for manual relocation or reinstallation.
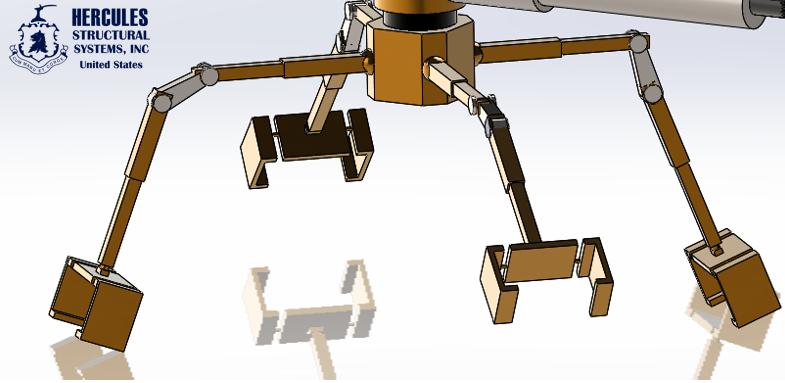
At the bottom of the robot, there are grippers (clamps) that are responsible for moving and installing structural components such as beams and joints. These grippers have the ability to precisely grip heavy metal parts and place them in pre-determined positions. Additionally, their design is tailored to match the shape and dimensions of the prefabricated joints.
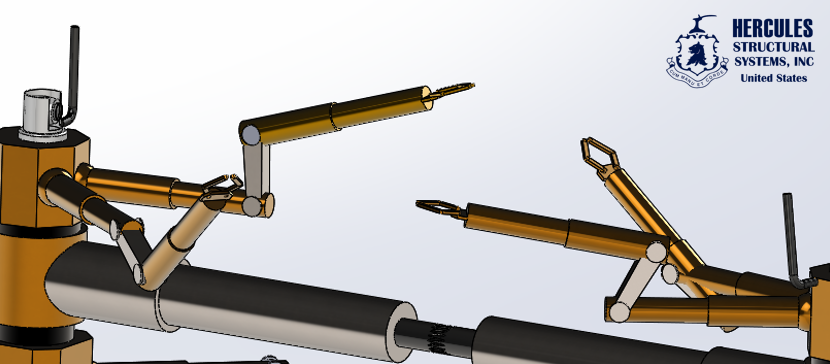
At the top of the robot, there are arms responsible for assembling and tightening bolts and screws. These arms operate through a Bluetooth or Wi-Fi-based control system, allowing them to perform the fastening process automatically without direct human intervention.
At the top of the robot, there are arms responsible for assembling and tightening bolts and screws. These arms operate through a Bluetooth or Wi-Fi-based control system, allowing them to perform the fastening process automatically without direct human intervention.
To enhance the stability and balance of the system, two robots operate simultaneously on a single frame. These two robots are synchronized, allowing for smooth movement in up, down, left, and right directions without vibration or deviation. Additionally, the connection between the joints and the lower grippers is designed in a way that enables precise component handling and easier installation.
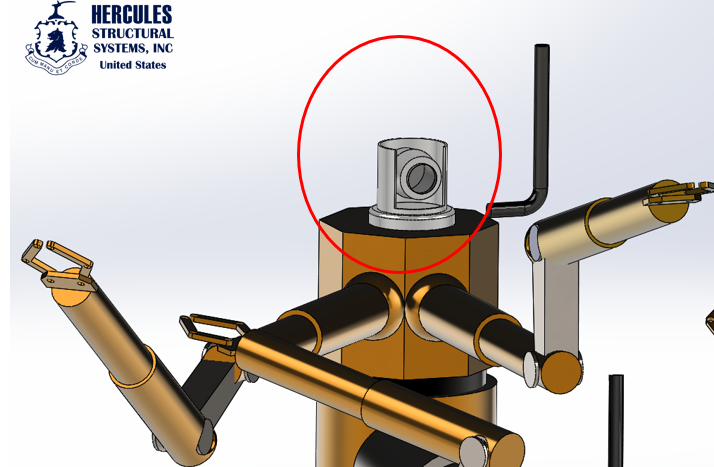
At the top of the robot, a camera is installed that is used for real-time monitoring, guidance, and documentation of the assembly process. This camera can transmit images and data to the operator or the central control system, allowing the quality of execution to be monitored in real time.